

лПД 1 к≥†лПД мХљ 6 kmл°ЬлґАнД∞ міђмШБнХЬ л•ШмЪ∞кЈЄмЪ∞.2018лЕД 7мЫФ 20мЭЉ, 16 мЛЬк≤љ(мЭЉл≥Є мЛЬк∞Д)мЧР лІЭмЫРмЭШ кіСнХЩ нХ≠л≤Х мєіл©ФлЭЉ(ONC-T)мЧР мЭШнХімДЬ міђмШБ.
нЩФмГБ нБђл†ИлФФнКЄвАїпЉЪJAXA, лПДмњДлМА, мљФмєШлМА, л¶њмњД лМАнХЩ, лВШк≥†мХЉлМА, мєШл∞Ф к≥µлМА, л©ФмЭімІАлМА, мХДмЭім¶ИлМА, мВ∞мЧЕкЄ∞мИ† мҐЕнХ©мЧ∞кµђмЖМ
м†ДмЮђмЫР http://www.hayabusa2.jaxa.jp/topics/20180725je/index.html
лПД 1мЭА, мІАкЄИкєМмІА нЩИ нПђмІАмЕШмЬЉл°ЬлґАнД∞ міђмШБлРШк≥† мЮИлНШ нЩФмГБ(мШИл•Љ лУ§л©і,мЭім™љ)к≥Љ лєДкµРнХШл©і, нХімГБлПДк∞А мХљ 3.4л∞∞ мШ§л•ік≥† мЮИмЦі 1 нЩФмЖМк∞А мХљ 60 cmмЧР лМАмЭСнХ©лЛИлЛ§.нЩФмГБ м§СмХЩ лґАкЈЉмЧР л•ШмЪ∞кЈЄмЪ∞ нСЬл©імЧРмДЬ мµЬлМАмЭШ нБђл†ИмЭінД∞к∞А ꣪놧мІАк≥† мЮИмКµлЛИлЛ§лІМ, вАЬмЬ†л∞ЬвАЭк≥Љ к∞ЩмЭА нШХнГЬл•Љ нХШк≥† мЮИлКФ к≤ГмЭД мЮШ мХХлЛИлЛ§.лШР, л•ШмЪ∞кЈЄмЪ∞мЭШ нСЬл©імЭі лІ§мЪ∞ лЛ§мИШмЭШ мХФкіі(л≥іл•ілЛ§)мЧР лНЃмЧђ мЮИлКФ мЭЉлПД мХХлЛИлЛ§.мЭі мВђмІДмЭА, м∞©л•Щ мІАм†РмЭД мД†нГЭнХШлКФлН∞ мЮИмЦімДЬлПД м§СмЪФнХЬ м†Хл≥ік∞А лР©лЛИлЛ§.
мЭіл≤И, к≥†лПДл•Љ лВіл¶∞ мЪімЪ©мЭА BOX-CмЪімЪ©мЬЉл°Ь лґИл¶ђлКФ к≤ГмЭі лР©лЛИлЛ§.лІ§ 2 нФДл°Ьм†ЭнКЄмЧРмДЬлКФ, BOX-A, BOX-B, BOX-CлЭЉлКФ к≤ГмЭД м†ХмЭШнХШк≥† мЮИмКµлЛИлЛ§.кЈЄл¶Љ 2мЧР BOXмЭШ мД§л™ЕмЭД лВШнГАлГЕлЛИлЛ§.
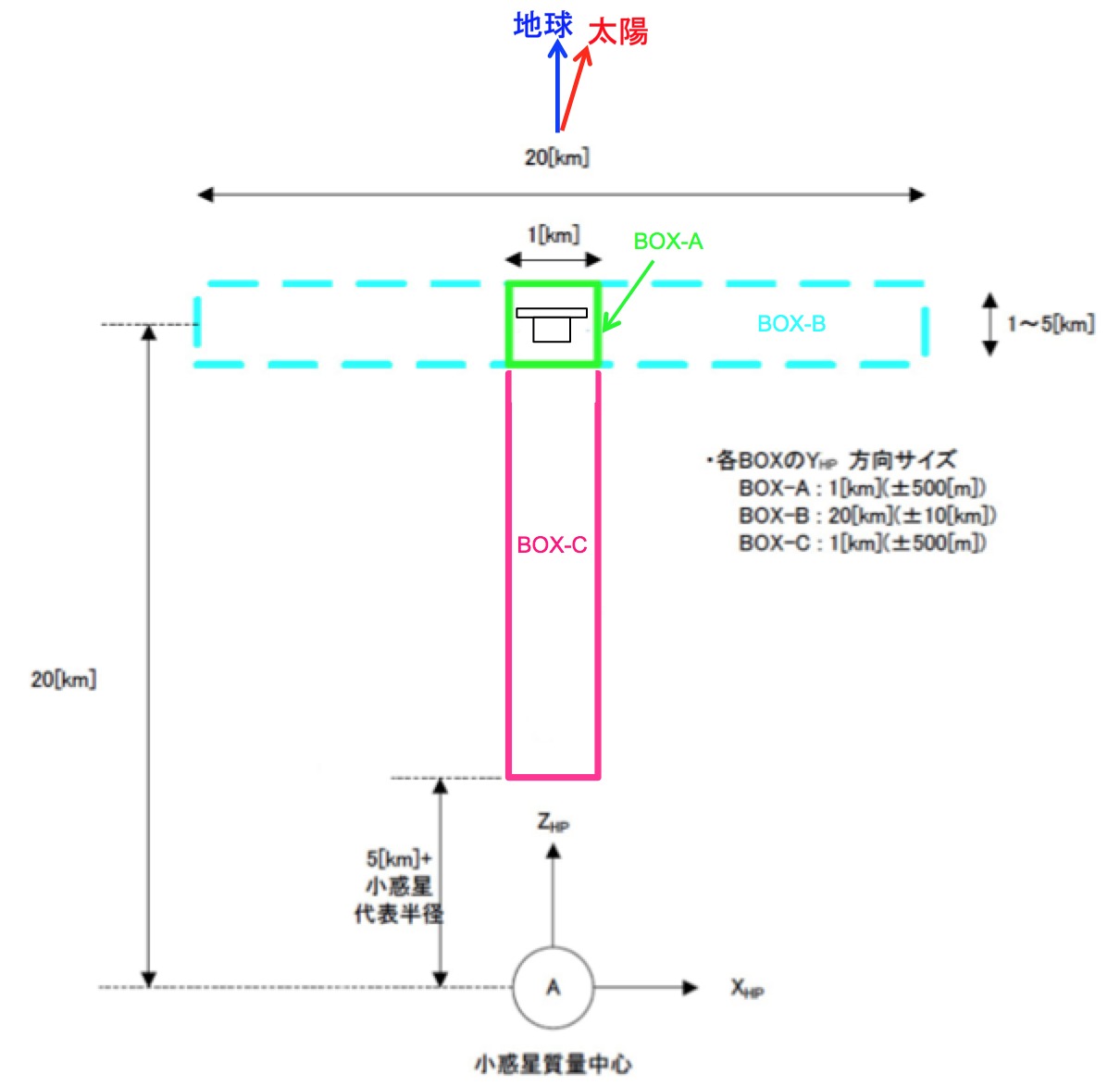 лПД 2гААBOXмЭШ м†ХмЭШ.XHP, YHP, ZHPлКФ нЩИ нПђмІАмЕШ мҐМнСЬк≥Д.YHPмґХмЭА мЭі мІАл©імЧР мИШмІБмЬЉл°Ь мІАл©імЭШ м†Ам™љ нОЄмЭД нЦ•нХШлКФ нЭ•лґДнХЬлЛ§.
лПД 2гААBOXмЭШ м†ХмЭШ.XHP, YHP, ZHPлКФ нЩИ нПђмІАмЕШ мҐМнСЬк≥Д.YHPмґХмЭА мЭі мІАл©імЧР мИШмІБмЬЉл°Ь мІАл©імЭШ м†Ам™љ нОЄмЭД нЦ•нХШлКФ нЭ•лґДнХЬлЛ§.
нЩФмГБ нБђл†ИлФФнКЄпЉЪJAXA
BOX-Aк∞А нЩИ нПђмІАмЕШмЧР лМАмЭСнХШлКФ к≤ГмЬЉл°Ь, к≥†лПДк∞А мХљ 20 kmк∞А лР©лЛИлЛ§.BOX-BлКФ к≥†лПДлКФ BOX-AмЩА к∞ЩмКµлЛИлЛ§лІМ, м†ДнЫДмҐМмЪ∞мЧР䔮 kmкєМмІА мЭілПЩнХ† мИШ мЮИлКФ л≤ФмЬДк∞А лР©лЛИлЛ§.кЈЄл¶ђк≥† BOX-CлКФ м†ДнЫДмҐМмЪ∞лКФ BOX-AмЩА к∞ЩмКµлЛИлЛ§лІМ, к≥†лПДл•Љ 5 km м†ХлПДкєМмІА лВіл†ЄлКФлН∞кєМмІА нПђнХ®нХЬ мШБмЧ≠мЮЕлЛИлЛ§.лНІлґЩмЧђ мЧђкЄ∞мДЬмЭШ мҐМнСЬк≥ДлКФ нФДл°Ьм†ЭнКЄл°Ь м†ХмЭШнХШк≥† мЮИлКФ нЩИ нПђмІАмЕШ мҐМнСЬк≥ДлЭЉлКФ к≤ГмЮЕлЛИлЛ§лІМ, м†ХмЭШлКФ мХДлЮШмЭШ кЈЄл¶Љ 3мЭД ліР м£ЉмДЄмЪФ.м§СмЪФнХЬ м†РмЭА, ZмґХмЭА нХ≠мГБ мЖМнЦЙмД±мЬЉл°ЬлґАнД∞ мІАкµђ л∞©нЦ•мЭД к∞Ал¶ђнВ§лКФ к≤ГмЭі лРШмЦі мЮИлКФ к≤ГмЮЕлЛИлЛ§.
м∞Єк≥†пЉЪнЩИ нПђмІАмЕШ мҐМнСЬк≥Д
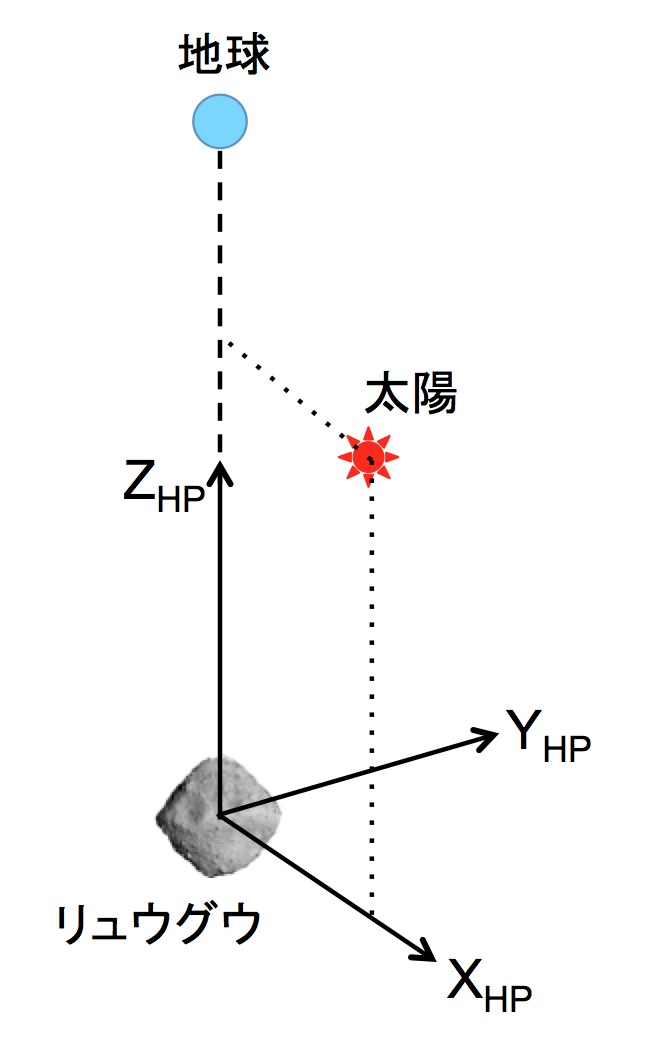 кЈЄл¶Љ 3 нЩИ нПђмІАмЕШ мҐМнСЬк≥ДмЭШ м†ХмЭШ
кЈЄл¶Љ 3 нЩИ нПђмІАмЕШ мҐМнСЬк≥ДмЭШ м†ХмЭШ
нЩФмГБ нБђл†ИлФФнКЄпЉЪJAXA
вАї нЩФмГБмЭД мЭЄмЪ©нХШлКФ к≤љмЪ∞мЧРлКФ нБђл†ИлФФнКЄл•Љ кЄ∞мЮђнХі м£ЉмДЄмЪФ.лІМмХљ нБђл†ИлФФнКЄмЭШ лЛ®мґХмЭі нХДмЪФнХЬ к≤љмЪ∞лКФ гАМJAXA, лПДмњДлМАнХЩлУ±гАНмЭілЭЉк≥† нСЬкЄ∞нХі м£ЉмДЄмЪФ.
лІ§ 2 нФДл°Ьм†ЭнКЄ
2018.07.25
нЦ•нЫДмЭШ мШИм†Х
| лЕД | мДЄмЫФ | мВђнХ≠ | мГБнЩ© |
|---|---|---|---|
| 2018 | 1мЫФ 10мЭЉ | м†Ь3кЄ∞ мЭімШ® мЧФмІД мЪім†Д к∞ЬмЛЬ | мЭі лБЭлВЬ |
| 6мЫФ 3мЭЉ | мЭімШ® мЧФмІД мЪім†Д мҐЕл£М | мЭі лБЭлВЬ | |
| 6мЫФ 3мЭЉ | мЖМнЦЙмД± м†СкЈЉ мЬ†лПД к∞ЬмЛЬ(к±∞л¶ђ 3100 km) | мЭі лБЭлВЬ | |
| 6мЫФ 27мЭЉ | мЖМнЦЙмД± лПДм∞©(к≥†лПД 20 km) | ||
| 7мЫФлІР | м§Ск≥†лПД кіАмЄ° 1(к≥†лПД 5 km) | мШИм†Х | |
| 8мЫФ | м§С놕к≥ДмЄ°к∞ХнХШ(к≥†лПД 1 km) | мШИм†Х | |
| 9мЫФ~10мЫФ | нД∞мєШлЛ§мЪі мЪімЪ© мКђл°ѓ 1 | мШИм†Х | |
| 9мЫФ~10мЫФ | л°Ьл∞Ф нИђнХШ мЪімЪ© мКђл°ѓ 1 | мШИм†Х | |
| 11мЫФ~12мЫФ | нХ©мЪімЪ©(нЖµмЛ† лґИк∞АмЭШ кЄ∞к∞Д) | мШИм†Х | |
| 2019 | 1мЫФ | м§Ск≥†лПД кіАмЄ° 2(к≥†лПД 5 km) | мШИм†Х |
| 2мЫФ | нД∞мєШлЛ§мЪі мЪімЪ© мКђл°ѓ 2 | мШИм†Х | |
| 3мЫФ~4мЫФ | нБђл†ИмЭінД∞ мГЭмД± мЪімЪ© | мШИм†Х | |
| 4мЫФ~5мЫФ | нД∞мєШлЛ§мЪі мЪімЪ© мКђл°ѓ 3 | мШИм†Х | |
| 7мЫФ | л°Ьл∞Ф нИђнХШ мЪімЪ© мКђл°ѓ 2 | мШИм†Х | |
| 8мЫФ~11мЫФ | мЖМнЦЙмД± кЈЉл∞© м≤імЮђ | мШИм†Х | |
| 11мЫФ~12мЫФ | мЖМнЦЙмД± мґЬл∞Ь | мШИм†Х |
лІ§ 2 нФДл°Ьм†ЭнКЄ
2018.07.05 к∞±мЛ†
 
еЫ≥пЉСгААйЂШеЇ¶зіД6kmгБЛгВЙжТЃељ±гБЧгБЯгГ™гГ•гВ¶гВ∞гВ¶гАВ2018еєі7жЬИ20жЧ•гАБ16жЩВй†ГпЉИжЧ•жЬђжЩВйЦУпЉЙгБЂжЬЫйБ†гБЃеЕЙе≠¶иИ™ж≥ХгВЂгГ°гГ©пЉИONC-TпЉЙгБЂгВИгБ£гБ¶жТЃељ±гАВ
зФїеГПгВѓгГђгВЄгГГгГИвАїпЉЪJAXA, жЭ±дЇђе§І, йЂШзЯ•е§І, зЂЛжХЩе§І, еРНеП§е±Ле§І, еНГиСЙеЈ•е§І, жШОж≤їе§І, дЉЪжі•е§І, зФ£зЈПз†Ф¬†¬†
迥иЉЙеЕГ¬†http://www.hayabusa2.jaxa.jp/topics/20180725je/index.html
 
еЫ≥1гБѓгАБгБУгВМгБЊгБІгГЫгГЉгГ†гГЭгВЄгВЈгГІгГ≥гБЛгВЙжТЃељ±гБХгВМгБ¶гБДгБЯзФїеГПпЉИдЊЛгБИгБ∞гАБгБУгБ°гВЙпЉЙгБ®жѓФгБєгВЛгБ®гАБиІ£еГПеЇ¶гБМзіД3.4еАНдЄКгБМгБ£гБ¶гБКгВКгАБ1зФїзі†гБМзіД60cmгБЂеѓЊењЬгБЧгБЊгБЩгАВзФїеГПдЄ≠е§ЃдїШињСгБЂгГ™гГ•гВ¶гВ∞гВ¶и°®йЭҐгБІжЬАе§ІгБЃгВѓгГђгГЉгВњгГЉгБМеЖЩгБХгВМгБ¶гБДгБЊгБЩгБМгАБвАЬгБЩгВКйЙҐвАЭгБЃгВИгБЖгБ™ељҐгВТгБЧгБ¶гБДгВЛгБУгБ®гБМгВИгБПеИЖгБЛгВКгБЊгБЩгАВгБЊгБЯгАБгГ™гГ•гВ¶гВ∞гВ¶гБЃи°®йЭҐгБМйЭЮеЄЄгБЂе§ЪжХ∞гБЃе≤©е°КпЉИгГЬгГЂгГАгГЉпЉЙгБЂи¶ЖгВПгВМгБ¶гБДгВЛгБУгБ®гВВеИЖгБЛгВКгБЊгБЩгАВгБУгБЃеЖЩзЬЯгБѓгАБзЭАйЩЄеЬ∞зВєгВТйБЄгБґдЄКгБІгВВйЗНи¶БгБ™жГЕ冱гБ®гБ™гВКгБЊгБЩгАВ
дїКеЫЮгАБйЂШеЇ¶гВТдЄЛгБТгБЯйБЛзФ®гБѓBOX-CйБЛзФ®гБ®еСЉгБ∞гВМгВЛгВВгБЃгБЂгБ™гВКгБЊгБЩгАВгБѓгВДгБґгБХпЉТгГЧгГ≠гВЄгВІгВѓгГИгБІгБѓгАБBOX-AгАБBOX-BгАБBOX-CгБ®гБДгБЖгВВгБЃгВТеЃЪзЊ©гБЧгБ¶гБДгБЊгБЩгАВеЫ≥пЉТгБЂBOXгБЃи™ђжШОгВТз§ЇгБЧгБЊгБЩгАВ
- еЫ≥пЉТгААBOXгБЃеЃЪзЊ©гАВXHPгАБYHPгАБZHPгБѓгГЫгГЉгГ†гГЭгВЄгВЈгГІгГ≥еЇІж®Щз≥їгАВYHPиїЄгБѓгБУгБЃзіЩйЭҐгБЂеЮВзЫігБІзіЩйЭҐгБЃеРСгБУгБЖеБігБЂеРСгБЛгБЖеРСгБНгБЂгБ™гВЛгАВ
зФїеГПгВѓгГђгВЄгГГгГИпЉЪJAXA
BOX-AгБМгГЫгГЉгГ†гГЭгВЄгВЈгГІгГ≥гБЂеѓЊењЬгБЩгВЛгВВгБЃгБІгАБйЂШеЇ¶гБМзіД20kmгБЂгБ™гВКгБЊгБЩгАВBOX-BгБѓйЂШеЇ¶гБѓBOX-AгБ®еРМгБШгБІгБЩгБМгАБеЙНеЊМеЈ¶еП≥гБЂ¬±10kmгБЊгБІзІїеЛХгБІгБНгВЛзѓДеЫ≤гБЂгБ™гВКгБЊгБЩгАВгБЭгБЧгБ¶BOX-CгБѓеЙНеЊМеЈ¶еП≥гБѓBOX-AгБ®еРМгБШгБІгБЩгБМгАБйЂШеЇ¶гВТ5kmгБПгВЙгБДгБЊгБІдЄЛгБТгБЯгБ®гБУгВНгБЊгБІеРЂгВАй†ШеЯЯгБІгБЩгАВгБ™гБКгАБгБУгБУгБІгБЃеЇІж®Щз≥їгБѓгГЧгГ≠гВЄгВІгВѓгГИгБІеЃЪзЊ©гБЧгБ¶гБДгВЛгГЫгГЉгГ†гГЭгВЄгВЈгГІгГ≥еЇІж®Щз≥їгБ®гБДгБЖгВВгБЃгБІгБЩгБМгАБеЃЪзЊ©гБѓдЄЛгБЃеЫ≥пЉУгВТгБФи¶ІгБПгБ†гБХгБДгАВйЗНи¶БгБ™зВєгБѓгАБZиїЄгБѓеЄЄгБЂе∞ПжГСжШЯгБЛгВЙеЬ∞зРГжЦєеРСгВТжМЗгБЩгВВгБЃгБЂгБ™гБ£гБ¶гБДгВЛгБ®гБДгБЖгБУгБ®гБІгБЩгАВ
дїКеЫЮгБѓгАБBOX-CгБІгБЃйБЛзФ®гВТи°МгБДгБЊгБЧгБЯгБМгАБ7жЬИ17жЧ•гБЛгВЙгВЖгБ£гБПгВКгБ®йЩНдЄЛгВТйЦЛеІЛгБЧгБЊгБЧгБЯгАВжЬАдљОйЂШеЇ¶дїШињСгБЂжїЮеЬ®гБЧгБ¶гБДгБЯгБЃгБѓ7жЬИ20жЧ•гБЛгВЙгБЃ1жЧ•йЦУгБІгБЩгАВгБУгБЃжЬЯйЦУгБЂи¶≥жЄђгВТеЃЯжЦљгБЧгБЯеЊМгАБ7жЬИ21жЧ•гБЂдЄКжШЗгВТйЦЛеІЛгБЧгАБ7жЬИ25жЧ•гБЂBOX-AгБЂжИїгВКгБЊгБЧгБЯгАВ
еПВиАГпЉЪгГЫгГЉгГ†гГЭгВЄгВЈгГІгГ≥еЇІж®Щз≥ї
- еЫ≥пЉУгААгГЫгГЉгГ†гГЭгВЄгВЈгГІгГ≥еЇІж®Щз≥їгБЃеЃЪзЊ©
зФїеГПгВѓгГђгВЄгГГгГИпЉЪJAXA
вАї зФїеГПгВТеЉХзФ®гБЩгВЛе†іеРИгБЂгБѓгВѓгГђгВЄгГГгГИгВТи®ШиЉЙгБЧгБ¶гБПгБ†гБХгБДгАВгВВгБЧгВѓгГђгВЄгГГгГИгБЃзЯ≠зЄЃгБМењЕи¶БгБ™е†іеРИгБѓгАМJAXAгАБжЭ±е§ІгБ™гБ©гАНгБ®и°®и®ШгБЧгБ¶гБПгБ†гБХгБДгАВ
гБѓгВДгБґгБХпЉТгГЧгГ≠гВЄгВІгВѓгГИ
2018.07.25
 
¬†дїКеЊМгБЃдЇИеЃЪ
| еєі | жЬИжЧ• | дЇЛй†Е | зКґж≥Б |
|---|---|---|---|
| 2018 | 1жЬИ10жЧ• | зђђ3жЬЯгВ§гВ™гГ≥гВ®гГ≥гВЄгГ≥йБЛ迥йЦЛеІЛ | жЄИгБњ |
| 6жЬИ3жЧ• | гВ§гВ™гГ≥гВ®гГ≥гВЄгГ≥йБЛ迥зµВдЇЖ | жЄИгБњ | |
| 6жЬИ3жЧ• | е∞ПжГСжШЯжО•ињСи™Ше∞ОйЦЛеІЛпЉИиЈЭйЫҐ3100kmпЉЙ | жЄИгБњ | |
| 6жЬИ27жЧ• | е∞ПжГСжШЯеИ∞зЭАпЉИйЂШеЇ¶20kmпЉЙ | жЄИгБњ | |
| 7жЬИжЬЂ | дЄ≠йЂШеЇ¶и¶≥жЄђпЉСпЉИйЂШеЇ¶5kmпЉЙ | дЇИеЃЪ | |
| 8жЬИ | йЗНеКЫи®ИжЄђйЩНдЄЛпЉИйЂШеЇ¶1kmпЉЙ | дЇИеЃЪ | |
| 9жЬИпљЮ10жЬИ | гВњгГГгГБгГАгВ¶гГ≥йБЛзФ®гВєгГ≠гГГгГИпЉС | дЇИеЃЪ | |
| 9жЬИпљЮ10жЬИ | гГ≠гГЉгГРжКХдЄЛйБЛзФ®гВєгГ≠гГГгГИпЉС | дЇИеЃЪ | |
| 11жЬИпљЮ12жЬИ | еРИйБЛзФ®пЉИйАЪдњ°дЄНеПѓгБЃжЬЯйЦУпЉЙ | дЇИеЃЪ | |
| 2019 | 1жЬИ | дЄ≠йЂШеЇ¶и¶≥жЄђпЉТпЉИйЂШеЇ¶5kmпЉЙ | дЇИеЃЪ |
| 2жЬИ | гВњгГГгГБгГАгВ¶гГ≥йБЛзФ®гВєгГ≠гГГгГИпЉТ | дЇИеЃЪ | |
| 3жЬИпљЮ4жЬИ | гВѓгГђгГЉгВњгГЉзФЯжИРйБЛзФ® | дЇИеЃЪ | |
| 4жЬИпљЮ5жЬИ | гВњгГГгГБгГАгВ¶гГ≥йБЛзФ®гВєгГ≠гГГгГИпЉУ | дЇИеЃЪ | |
| 7жЬИ | гГ≠гГЉгГРжКХдЄЛйБЛзФ®гВєгГ≠гГГгГИпЉТ | дЇИеЃЪ | |
| 8жЬИпљЮ11жЬИ | е∞ПжГСжШЯињСеВНжїЮеЬ® | дЇИеЃЪ | |
| 11жЬИпљЮ12жЬИ | е∞ПжГСжШЯеЗЇзЩЇ | дЇИеЃЪ |
гБѓгВДгБґгБХпЉТгГЧгГ≠гВЄгВІгВѓгГИ
2018.07.05 жЫіжЦ∞